https://arxiv.org/abs/2104.00800
SMORES-EP, a Modular Robot with Parallel Self-assembly
Self-assembly of modular robotic systems enables the construction of complex robotic configurations to adapt to different tasks. This paper presents a framework for SMORES types of modular robots to efficiently self-assemble into tree topologies. These mod
arxiv.org
Abstract
EP 자석을 사용하는 SMORES 형태의 Modular Robot 제어에 관한 논문입니다. 따라서 글에서는 하드웨어 구조나 실험에 대한 설명은 최소화하고, 논문의 핵심 기여점인 제어 알고리즘 부문을 중심으로 얘기해볼까 합니다. 생략된 내용이 다소 많으므로 참고용으로만 보시기를 바랍니다.
Introduction
제한적 기능을 가진 단일 로봇(휴머노이드 등)에 비해,상황에 따라 조립과 분해가 가능한 모듈형 로봇(Modular Robot)은 무한한 잠재력을 가집니다. 복잡한 지형 극복, 물체 조작, 협력 이동 등 임무에 맞춰 로봇의 형태(Morphology)를 자유롭게 바꿀 수 있기 때문입니다. 그러나 모듈의 수가 늘어날수록 시스템의 제어 복잡도가 기하급수적으로 증가하고, 하드웨어적 제약 조건 하에서 충돌 없이 정밀하게 도킹(Docking)을 수행하는 것이 매우 어렵다는 한계가 있습니다.
본 논문은 이러한 한계를 극복하고, 여러 개의 모듈형 로봇이 트리 토폴로지(Tree Topology) 형태로 효율적이고 안정적인 병렬 자가 조립(Parallel Self-assembly)을 수행할 수 있는 상위단 제어 알고리즘을 제안합니다.
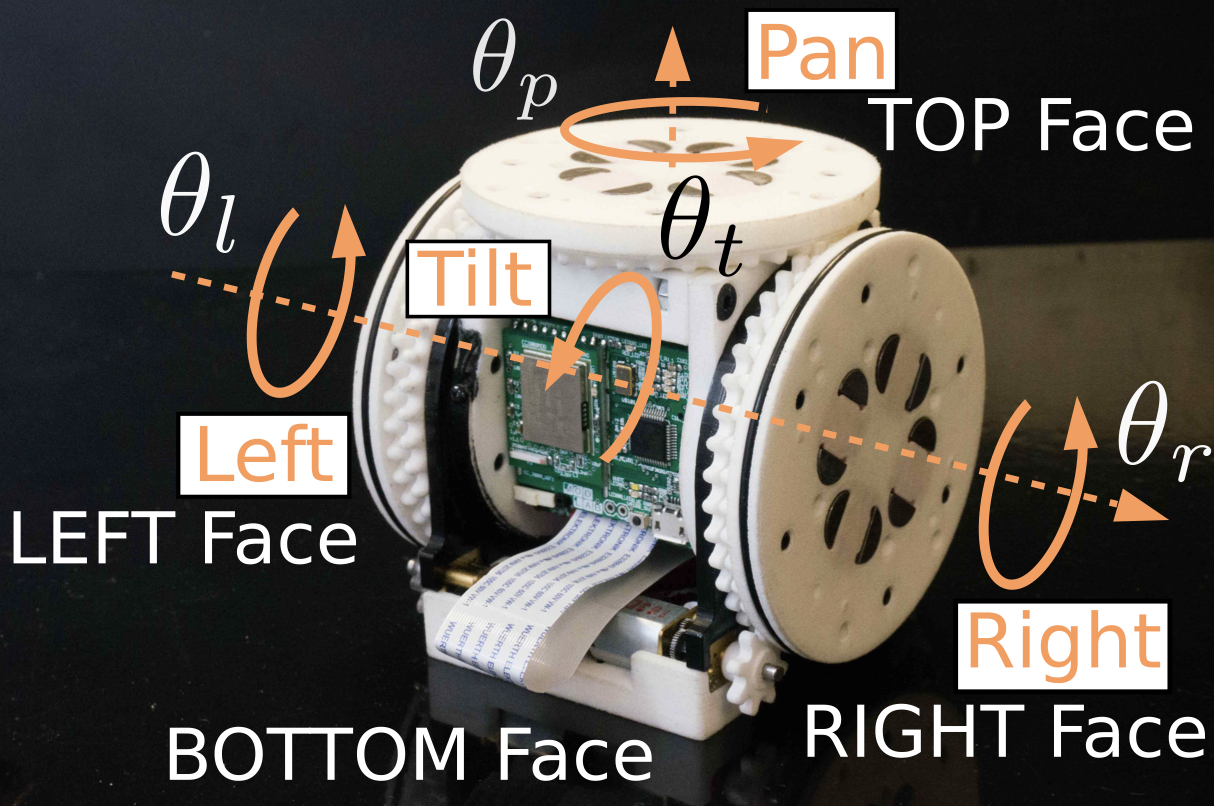
SMORES-EP는 SMORES(Self-assembly MOdular Robot for Extreme Shape-shifting)의 최신 버전으로, 이름 그대로 극단적인 형태 변형을 목표로 설계된 모듈러 로봇입니다. 각 모듈은 컴팩트한 크기(80mm 정육면체)에 4 DoF(자유도)를 가집니다.
LEFT, RIGHT, PAN, TILT 축으로 구성되며, LEFT와 RIGHT 축은 바퀴 역할을 하여 차동 구동(Differential Drive) 방식으로 평면을 이동할 수 있습니다. LEFT, RIGHT, TOP, BOTTOM 총 4개의 면에 결합용 커넥터가 있습니다. 커넥터로 EP Magnet이라는 굉장히 흥미로운 자석이 활용되는데, 일반 전자석은 계속 전류를 흘려야 하지만 EP Magnet은 짧은 전류 펄스만으로 ON/OFF 상태를 변경할 수 있습니다. 따라서 전력 소모가 매우 적은데 결합력은 최대 약 90N에 달합니다. 논문에 따르면 약 4mm 정도 떨어져 있어도 자동으로 끌어당겨 결합이 가능하다고 합니다.
논문의 전체 흐름은 크게 세 단계로 나뉩니다.
1. Root Module Search
2. Task Assignment
3. Docking Control
목표 topology가 주어지면,
1. 루트 모듈을 찾고
2. 각 실제 모듈에게 역할을 배정한 뒤
3. 충돌 없이 이동하여 결합합니다.
Modular Robot Topology Configuration
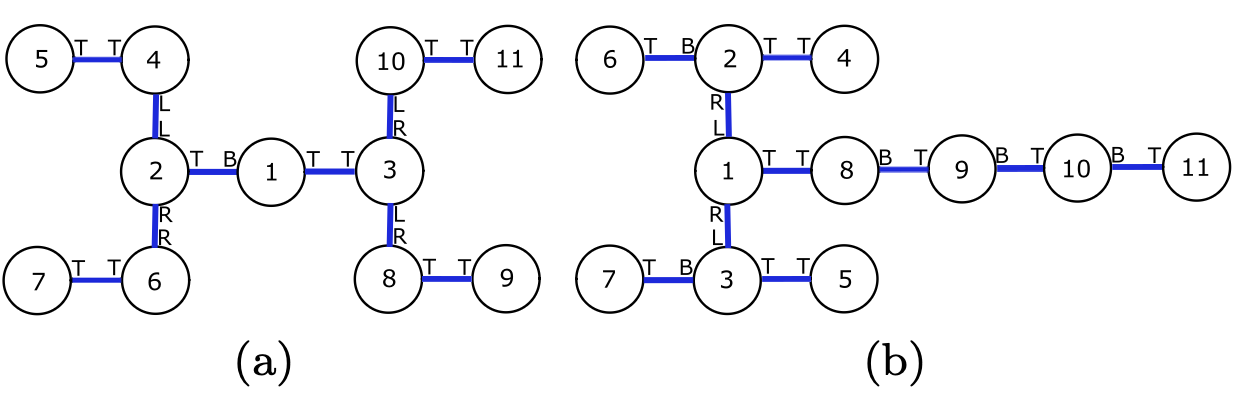
목표로 하는 그래프 G=(V, E)(G는 graph, V는 노드, E는 간선)가 주어지면, 알고리즘은 먼저 시스템의 중심이 될 루트 노드(τ)를 찾습니다. 논문에서는 트리의 균형을 최적화하기 위해 트리 센트로이드(Tree Centroid) 개념을 활용합니다. 특정 노드를 기준으로 한 하위 서브트리들의 모듈 수가 전체 모듈 수의 과반수(1/2) 이하가 되도록 하는 노드를 τ로 지정하는 방식입니다.

τ 기준 특정 방향에 결합된 모듈들이 전체 모듈의 과반수 이하일 경우 루트모듈임을 의미합니다.
다음을 충족시키는 τ를 구하는 것이 topology configuration의 핵심이자 Algorithm 1의 내용이라고 볼 수 있겠습니다.
(1/4이 아닌 1/2인 이유에 대해 의문을 가졌었는데, 이는 tree controid 개념을 참고하시면 됩니다.)
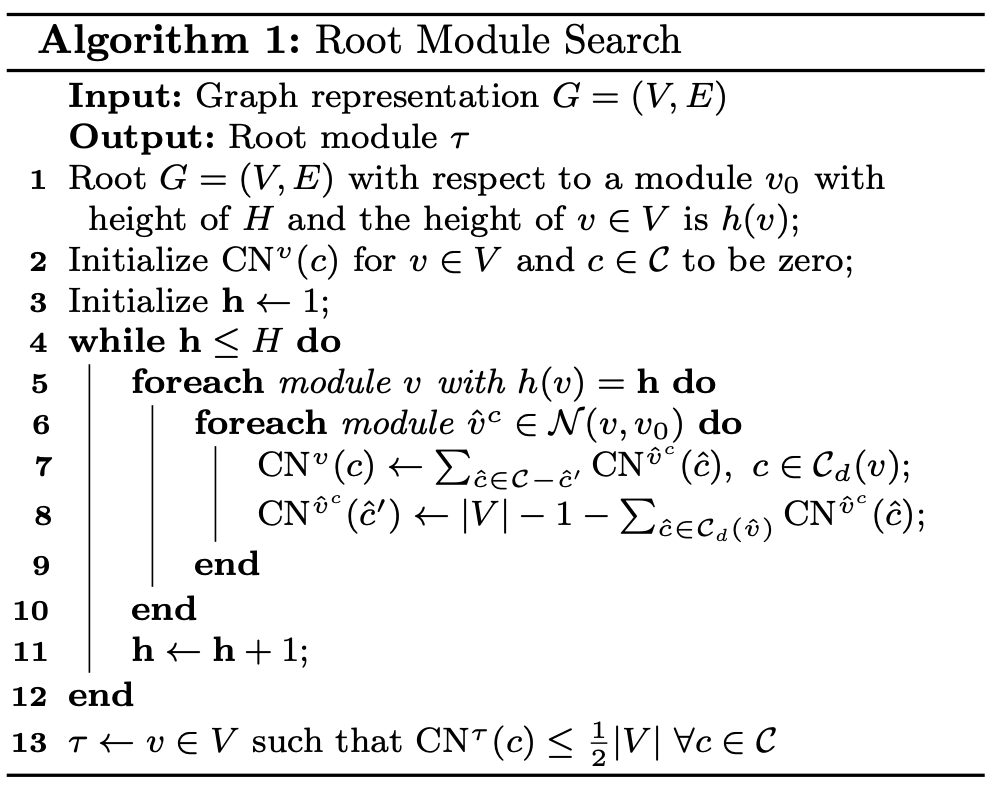
무작위 v_0을 구해서 트리를 루팅한 뒤,
모든 h(v)가 1인 v(즉 leaf 위 노드)에 대해 자식 노드(leaf)의 CN을 합산(7열),
모든 h(v)가 1인 v의 부모 노드의 CN값을 구해 합산(8열)하여 상단 식을 충족시키는 v를 τ로 지정합니다.
해당 알고리즘은 Bottom-Up Dynamic Programming를 통해 O(|V|)의 시간복잡도로 계산될 수 있습니다.
동시에 동시에 물리적 세계(평면 위)에서도 무게중심과 가장 가까운 최적의 실제 모듈(m_τ)을 선택해야 합니다.
위 식과 같이 전체 모듈들의 기하학적 중심(o_c)과 개별 모듈의 현재 위치(o_i) 사이의 유클리드 거리가 가장 최소인 모듈이 물리적 루트 모듈(m_τ)이 됩니다. m_τ에 대한 모든 m_i의 상태는 rigid body transformation을 통해 표현됩니다.
Self-assembly Problem
이제 실제로 결합할 차례입니다. 결합의 목적은 SMORES-EP tree topology configuration G=(V,E) 를 실제로 형성하는 것입니다. 이때, 평면 위에 펼쳐질 수 있는 topology만이 실제 결합될 수 있습니다. (아무래도 사방에 결합돼있는 구조는 구현하기가 곤란합니다.)
따라서 평면 위에 펼쳐질 수 있는 target kinematic topology G = (V,E)는 다음 조건을 만족합니다.
- G is a connected graph;
- The Euclidean distance between two adjacent modules is w; (w는 모듈의 길이)
- The center of every module occupies a unique location.
따라서 우리가 해결해야 할 문제는, 충돌 없이 목표 topology를 형성하기 위한 결합 동작을 찾아내는 것입니다.
Task Assignment
루트 모듈이 결정되면 가상의 목표 토폴로지 상의 노드들과 평면 위에 흩어져 있는 실제 모듈들을 1:1로 매핑해 주어야 합니다. 본 논문에서는 모든 모듈의 총 이동 거리를 최소화하는 방향으로 최적화 문제를 정의하고, 이를 Kuhn-Munkres (헝가리안) 알고리즘 등을 활용하여 해결합니다. 이 매핑 정보를 기반으로 각 모듈은 자신이 도달해야 할 최종 목표 위치와 결합해야 할 상대 모듈을 할당받게 됩니다.

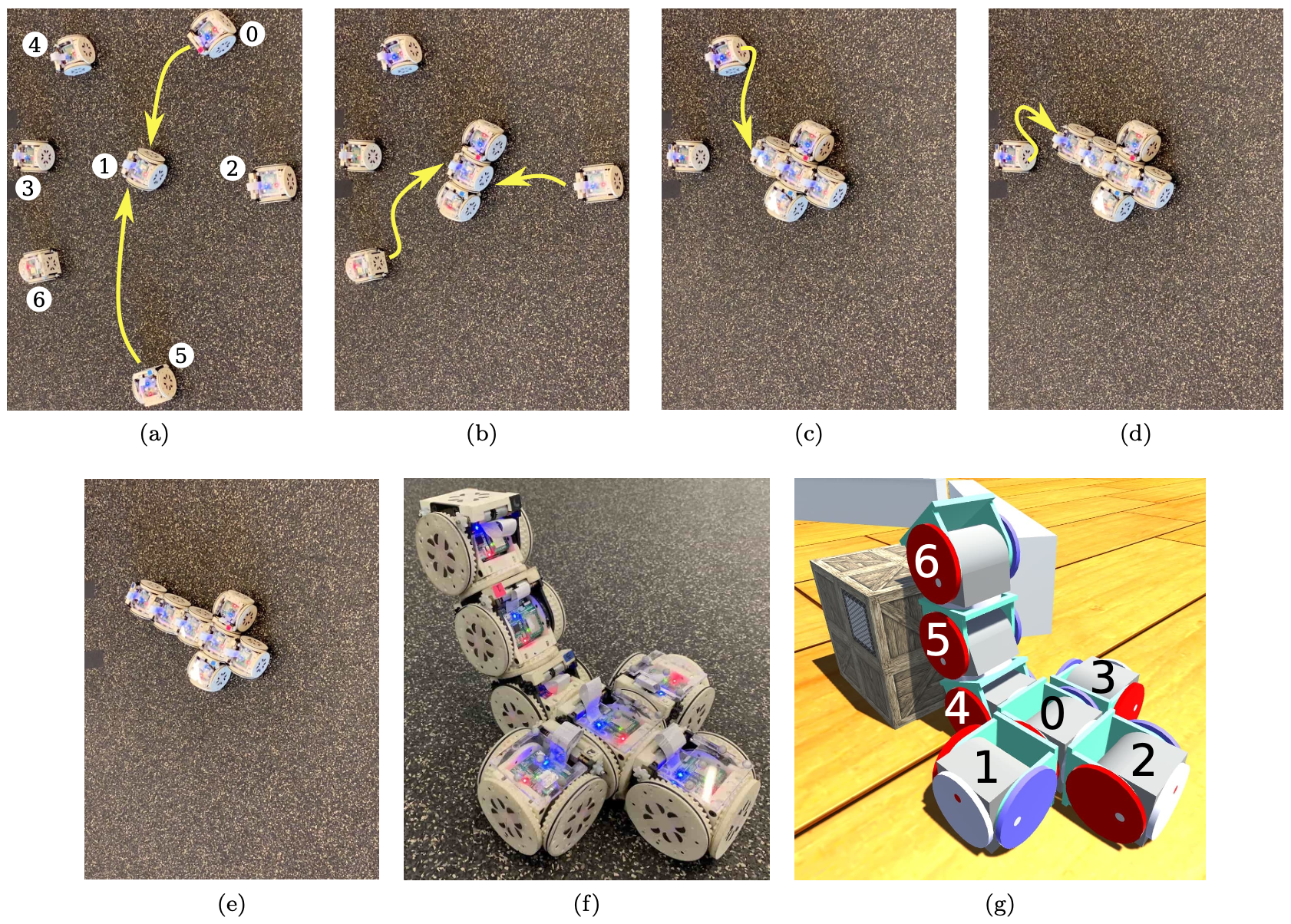
Parallel Assembly Actions
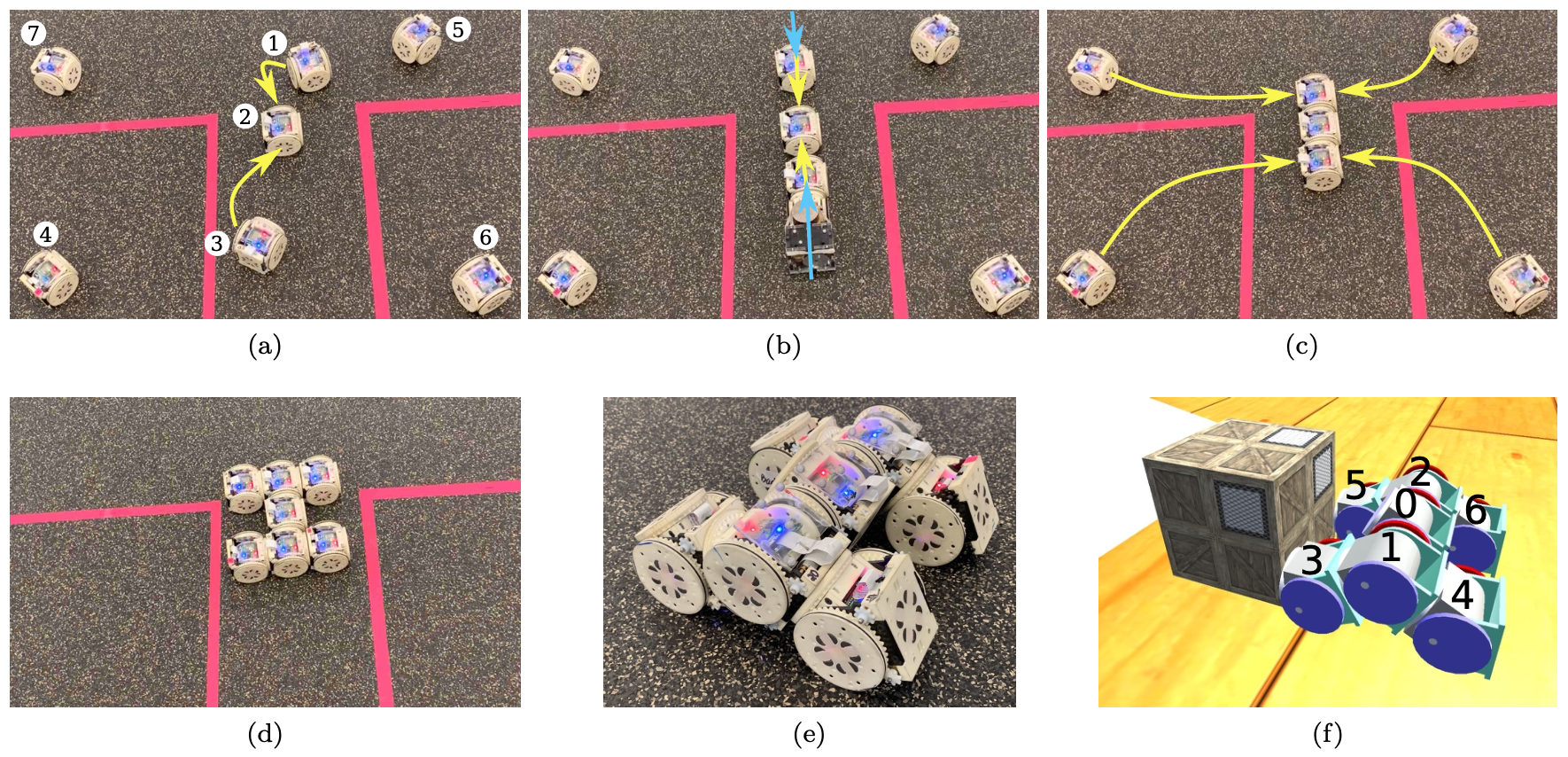
매핑이 완료되면 루트 모듈을 중심으로 하는 그리드(Grid) 환경이 생성되며, Depth를 가진 모듈들이 병렬적으로 조립을 시작합니다. 도킹은 자가 조립에서 오차가 가장 발생하기 쉽고 실패 확률이 높은 단계이므로, 논문에서는 이를 Navigation →Pose Adjustment → Approach의 3단계 닫힌 루프 제어로 세분화했습니다.
Navigation: 모듈들은 다중 로봇 경로 플래너(Multi-vehicle Planner)를 통해 서로 충돌하지 않는 최적의 전역 경로를 생성한 뒤, 도킹 대상 모듈의 근처 그리드까지 이동합니다.

Pose Adjustment: 도킹 직전 단계로, 타겟 커넥터면과 자신의 커넥터면을 완벽히 정렬하는 핵심 과정입니다.
- TOP / BOTTOM Face 결합: 자체 DoF(자유도)를 활용하여 본인의 상태를 능동적으로 보정할 수 있습니다.
- LEFT / RIGHT Face 결합: 모듈 구조상 좌우 면은 지면과 평행하게 구동되는 바퀴 축과 연결되어 있어, 평면 이동 상태에서는 자유로운 각도 정렬이 어렵습니다. 따라서 이 경우에는 추가적인 부속품을 장착한 별도의 Helping Module이 투입됩니다. Helping Module이 도킹 대상 모듈을 위로 들어 올려(Lift) 공중에서 자유롭게 면을 정렬할 수 있도록 도운 후 목적지까지 배달해 줍니다.

Approach: 정렬이 완료되면 접근 후 결합합니다. 두 모듈의 거리가 영구전자석(EP)의 유효 거리(약 4mm) 이내로 들어오면 강한 자력에 의해 물리적으로 결합되며 도킹이 완료됩니다.
이때, 평면 위의 루트 모듈은 바닥에 고정되어 있지 않기 때문에 모든 방향에서 동시에 도킹을 시도하면 위치가 틀어질 수 있습니다. 예외적으로 루트 모듈의 경우에는 LEFT Face와 RIGHT Face 결합을 우선적으로, TOP Face와 BOTTOM Face의 결합을 이후 진행합니다. 이러한 과정을 통해 결과적으로 주어진 topology를 구현해낼 수 있습니다.
Experiments
논문서 제안한 프레임워크의 실효성을 검증하기 위해 세 가지 실험을 수행합니다.


또한, 단순히 해체된 모듈들의 자가 조립뿐만 아니라, Walker(보행 로봇)형태에서 Mobile Manipulator 형태로 구조를 바꾸는 Self-reconfiguration 과정 역시 전체 분리 후 parallel assembly 알고리즘을 적용하여 시간을 단축시켰다고 합니다.
Conclusion
SMORES-EP 자체는 기존 연구의 연장선상에 가깝습니다. 오히려 핵심은
- Tree Centroid 기반 Root Selection
- Hungarian Algorithm 기반 Task Assignment
- Depth 기반 Parallel Assembly
- 실제 하드웨어에서 동작 가능한 Docking Controller
를 하나의 파이프라인으로 통합했다는 점입니다. 물론 아직 VICON에 의존하고 있으며, 3차원 구조 생성이나 대규모 모듈 집단에 대한 검증은 부족합니다. 실제 야외 환경에서 사용하기까지는 갈 길이 멉니다. 그럼에도 불구하고 "모듈형 로봇을 실제로 빠르게 조립시키려면 무엇이 필요한가?"에 대한 상당히 현실적인 답을 제시한 논문이라고 생각합니다. 생략된 내용이 상당히 많으니 논문을 읽어보시기를 바랍니다.